
Disimulink hasilnya nanti sama halnya dengan M-file dimana sudah kita bahas pada postingan PENGENDALI PID (PID CONTROLLER) DENGAN MATLAB (M-FILE). hanya saja berbeda cara, benar kata pepatah banyak jalan menuju roma, Jadi sekarang terserah anda mau menggunakan fasilitas M-FILE pada matlab atau Simulink tapi yang penting mengerti kedua-duanya lebih bagus.
Contoh :
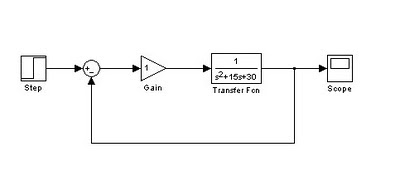
Suatu system control memiliki transfer fungsi / fungsi alih sebagai berikut :

Sekarang buka software matlab anda Buka Simulink dengan mengKlik tanda Simulink atau ketikkan simulink di command windows lalu enter > Setelah berhasil >File >New >Model.
- Setelah itu rangkailah gambar seperti dibawah ini
- Kemudian Save dan Start Simulation (Ctrl+T).
Hasilnya :
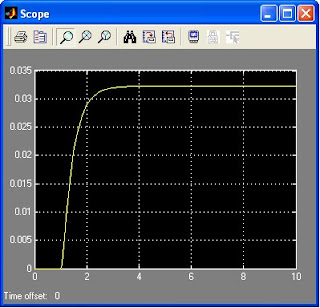
Gambar Respon Awal Sistem
Sekarang kita menggunakan pengendali P, PD, PI dan PID:
1. Kendali Proporsional
Rangkailah simulink seperti gambar berikut dimana sama seperti gambar diatas hanya saja nilai gainnya=100(Kp) :

Hasil Respon Sistemnya :

Gambar Respon Sistem dengan Kendali P
2. Kendali Proporsional dan Derivative
Rangkailah gambar di simulink seperti gambar berikut :
Kp=300 dan Kd=10
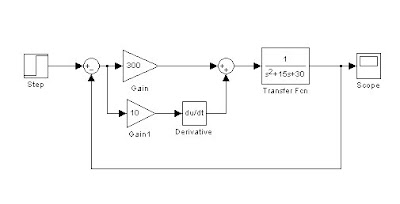
Hasil Respon Sistemnya :

Gambar Respon Sistem dengan Kendali PD
3. Kendali Proporsional dan Integral
Rangkailah gambar di simulink seperti gambar berikut :
Kp=40 dan Ki=100

Hasil Respon Sistemnya :

Gambar Respon Sistem dengan Kendali PI
4. Kendali Proporsional , Integral dan Derivative (PID) :
Rangkailah gambar di simulink seperti gambar berikut :
kp=350,ki=300 dan kd=50;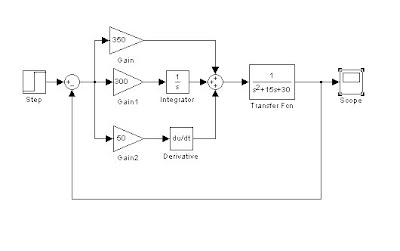
Hasil Respon Sistemnya :

Dari percobaan di atas dapat ditarik kesimpulan bahwa masing – masing pengendali memiliki karakteristik sebagai berikut :
1. Kontroler Proporsional (P)
Pengaruh pada sistem :
• Menambah atau mengurangi kestabilan
• Dapat memperbaiki respon transien khususnya : rise time, settling time.
• Mengurangi waktu naik, tidak menghilangkan Error steady state
Untuk menghilangkan Ess, dibutuhkan KP besar, yang akan membuat sistem lebih tidak stabil.
2. Kontroler Integral (I)
Pengaruh pada sistem :
• Menghilangkan Error Steady State
• Respon lebih lambat (dibanding P)
• Dapat menimbulkan ketidakstabilan (karena menambah orde sistem)
3. Kontroler Derivatif (D)
Pengaruh pada sistem :
• Memberikan efek redaman pada sistem yang berosilasi sehingga bisa memperbesar pemberian nilai Kp .
• Memperbaiki respon transien, karena memberikan aksi saat ada perubahan error.
• D hanya berubah saat ada perubahan error, sehingga saat ada error statis D tidak beraksi Sehingga D tidak boleh digunakan sendiri.
thanks,, izin save yaa...
BalasHapusgood, easy and simplicitid you class
BalasHapusGracias por tu aporte...sigue asi
good info... maksih
BalasHapus