
Setelah anda memahami dasar teori dari Pengendali PID dimana anda bisa membacanya dipostingan MENGENAL PENGENDALI PID (PID CONTROLLER), maka kali ini kita akan langsung terjun ke suatu masalah system yang kita akan kendalikan dengan pengendali Proportional (P), Integral (I), dan Derivative (D).
Ingat disini kita menggunakan metode heuristik atau metode coba-coba dalam mencari nilai kp, ki, dan kd dengan patokan mencari system yang kita inginkan dan jangan lupa dan untuk pedoman dalam memberikan nilai kp, kd, dan ki kita dapat melihatnya pada table karakteristik masing-masing pengendali yang ada pada postingan sebelumnya.
Contoh :
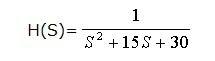
Suatu system control memiliki transfer fungsi / fungsi alih sebagai berikut :

Sekarang buka software matlab anda File > New > M-File, kemudian tuliskan program seperti berikut :
num=[1];
den=[1 15 30];
step(num,den);
title('Respon Awal Sistem');
Kemudian Save ingat menyimpan file pada mtlab tidak boleh menggunakan angka, spasi hanya boleh huruf saja, kemudian tekan F5 (Run).
Hasilnya :

Gambar Respon Awal Sistem
Penyelesaian :
Setelah melihat hasil respon awal seperti diatas sekarang kita mencoba satu menggunakan Pengendali P, PI, PD dan PID.
1. Kendali Proporsional
Dari persamaan fungsi alih yang diketahui :
Maka kita bentuk menjadi close loop dengan penambahan Kp didapatlah :

Jadi Program matlabnya adalah:
t=0:0.01:2;
kp=300;
num=[kp];
den=[1 15 30+kp];
step(num,den,t);
title('Respon Sistem dengan Kendali P');

Gambar Respon Sistem dengan Kendali P
2. Kendali Proporsional dan Derivative

Maka Program matlabnya adalah :
t=0:0.01:2;
kp=300;
kd=10;
num=[kd kp];
den=[1 15+kd 30+kp];
step(num,den,t);
title('Respon Sistem dengan Kendali PD');
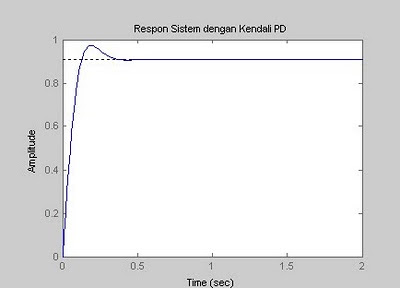
Gambar Respon Sistem dengan Kendali PD
3. Kendali Proporsional dan Integral
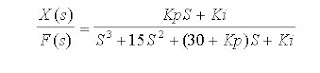
Maka Program matlabnya adalah :
t=0:0.01:2;
kp=40;
ki=100;
num=[kp ki];
den=[1 15 30+kp ki];
step(num,den,t);
title('Respon Sistem dengan Kendali PI');

Gambar Respon Sistem dengan Kendali PI
4. Kendali Proporsional , Integral dan Derivative :

Maka Program matlabnya adalah :
t=0:0.01:2;
kp=350;
ki=300;
kd=50;
num=[kd kp ki];
den=[1 15+kd 30+kp ki];
step(num,den,t);
title('Respon Sistem dengan Kendali PID');
Hasil Respon Sistemnya:
Maka Program matlabnya adalah :
t=0:0.01:2;
kp=350;
ki=300;
kd=50;
num=[kd kp ki];
den=[1 15+kd 30+kp ki];
step(num,den,t);
title('Respon Sistem dengan Kendali PID');
Hasil Respon Sistemnya:

Gambar Respon Sistem dengan Kendali PID
Baca juga postingan saya PENGENDALI PID (PID CONTROLLER) DENGAN MATLAB (SIMULINK).
teorinya ternyata rumit juga. saya biasanya menggunakan auto tuning untuk mendapatkan nilai pid
BalasHapusterima kasih, ini yang sangat saya perlukan..
BalasHapuspunya contoh program untuk mengendalikan motor dc melalui serial mikro-Matlab?
BalasHapuskalo ada tlg infonya ke ach_goenkzzzz@yahoo.com
bole tau proses mendapatkan fungsi alih untuk tiap2 kontroler itu bagaimana ya?
BalasHapusterimakasih
hduh njlimet gan,,, ane kagak bgtu paham..
BalasHapus